RobustSENSE allows for adaptation to environment conditions at all levels
Today’s driver assistance systems stop working in harsh environmental conditions like snow, rain or sun-flare. They lack the possibility of interaction across all platform levels to adapt to current environmental conditions. Moreover, single failures or the degradation of system components cannot be compensated.
RobustSENSE’s integrated sensor platform and algorithms will overcome this situation by
- Introducing adaptability to harsh conditions and failures on every system level.
- Taking an integrated system approach with added redundancy on sensor and processing level.
The RobustSENSE system
The RobustSENSE system is built from different layers. The layers relate to the data and information flow within an intelligent sensor system that is reacting to real world conditions, managing diversity and complexity.
The layers strictly follow the data and information flow – except for one: the system performance monitoring is a horizontal task that enables overall system assessment and drawing conclusions.
All layers will later be reflected in components of the RobustSENSE system. The goal is to implement a robust, adaptable and reliable modular system that is able to react to environmental influences and perception degradations.
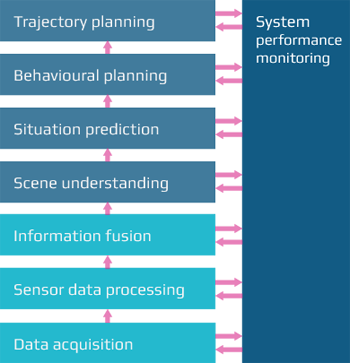
RobustSENSE system layers
Data acquisition and Sensor data processing
On the sensor layer level, RobustSENSE will retrieve the information required for the basic environment perception. RobustSENSE focuses on existing sensors and sensor principles, which will be enhanced where needed to increase robustness.
The targeted sensors are radar, lidar, camera, stereo camera, and near infrared / far infrared cameras. RobustSENSE aims to introduce a self-monitoring sensor suit to be able to apply adaptability to various environment conditions.
Taking radar sensors as an example, the polarisation properties and adaptive modulation will be exploited to increase performance. For cameras, image properties like contrast and illumination will influence the presently possible performance of image processing algorithms. On the other hand, lidar sensors show a degradation with respect to measurement distance in foggy or heavy rain weather conditions, which will be addressed by introducing new wavelengths for lidar.
Information fusion
In addition, information received from other cars or infrastructure will be considered as a virtual sensor input. All sensor information will be fused in a weighted manner to improve robustness and to minimise possible errors. RobustSENSE aims to use on-board maps or alternatively to receive maps from outside sources. For example, the maps represent available lanes, the layout of intersections, or expected infrastructure elements like traffic islands or traffic lights.
From scene understanding to trajectory planning
By incorporating probabilistic information throughout all software modules, the overall sensor platform will provide a higher reliability for existing and new sensor combinations. Sensor uncertainties and conflicting information will be reflected in the environment model. This will affect the results of situation understanding and prediction modules as well as behaviour and trajectory estimation.
For each module, closely connected assessment nodes are developed to monitor the current performance of the sensor platform. A common system assessment node combines the performance assessment and will inform about the available performance level of the full system. In cases of decreasing performance due to weather conditions or sensor malfunctions, the sensor platform is then able to decide about functional degradation.
The system performance assessment module
This software module analyses the status of the global perception of sensors and other modules installed in the vehicle. This analysis is made through live data provided to the RobustSENSE system. This allows making the correspondent decisions taking into account the status of the overall system. In this way, the reliability of every sensor and the other modules is known at any time, which can be affected by weather conditions, light or any other reasons.
First result: a system platform prototype
The goal is to develop a test bench to support and enhance the validation performed with vehicles in real conditions. The platform prototype allows connecting a net of sensors, equivalent to the ones installed in the vehicles, to perform testing in laboratory test chamber environment. These tests will be performed simulating different conditions for the sensors in designed scenarios and conditions, resulting on tests where every parameter can be controlled.